Ijon and I created a prototype clothing that used the phi phenomenon to create a sense of movement.
Have you ever felt the sensation of a bug or small animal crawling on you? Based on our "Crawl" pattern from earlier, we created a prototype "digital pet bug" that could only be felt and not seen. The user would be able to feel the pet bug crawl up and down their sleeve.
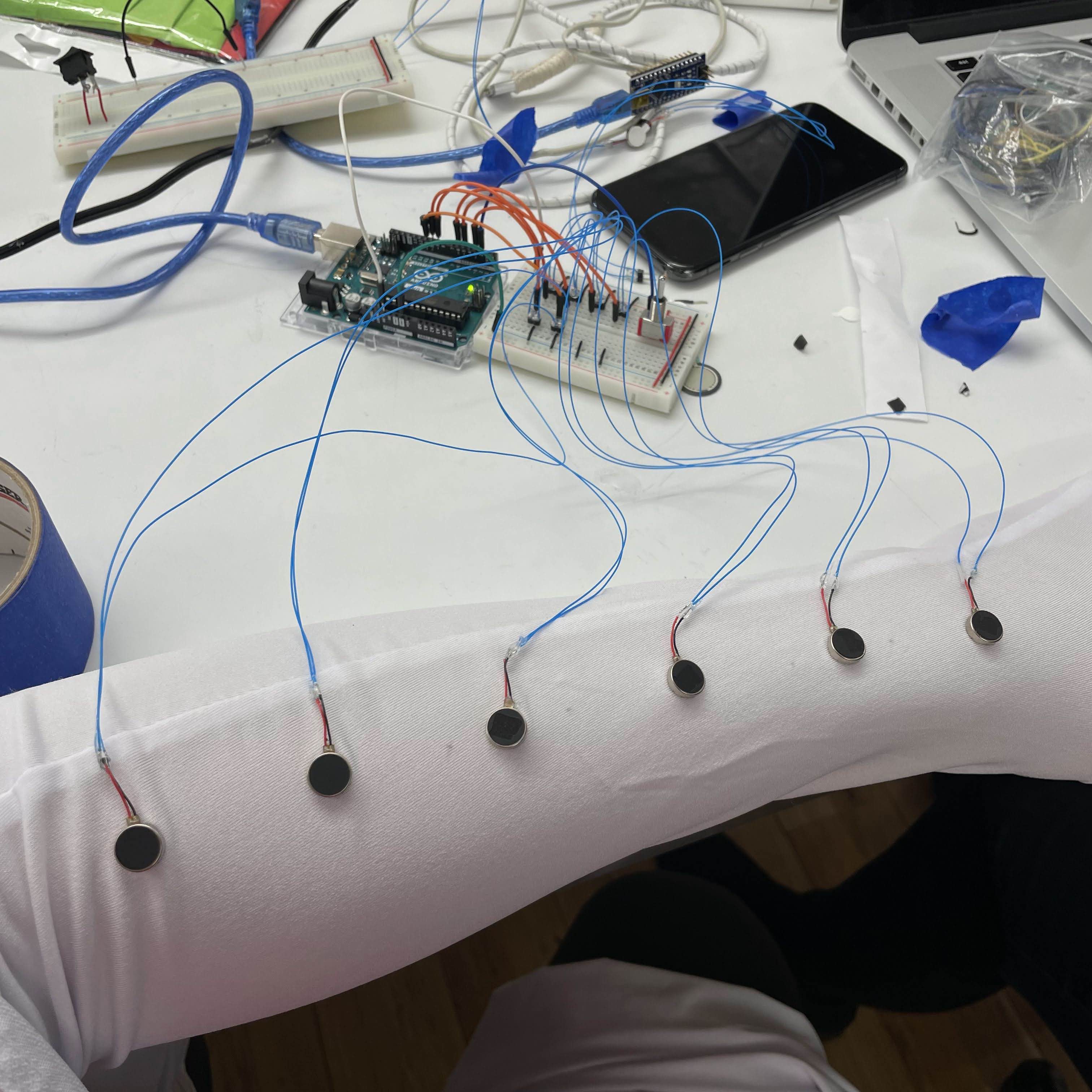
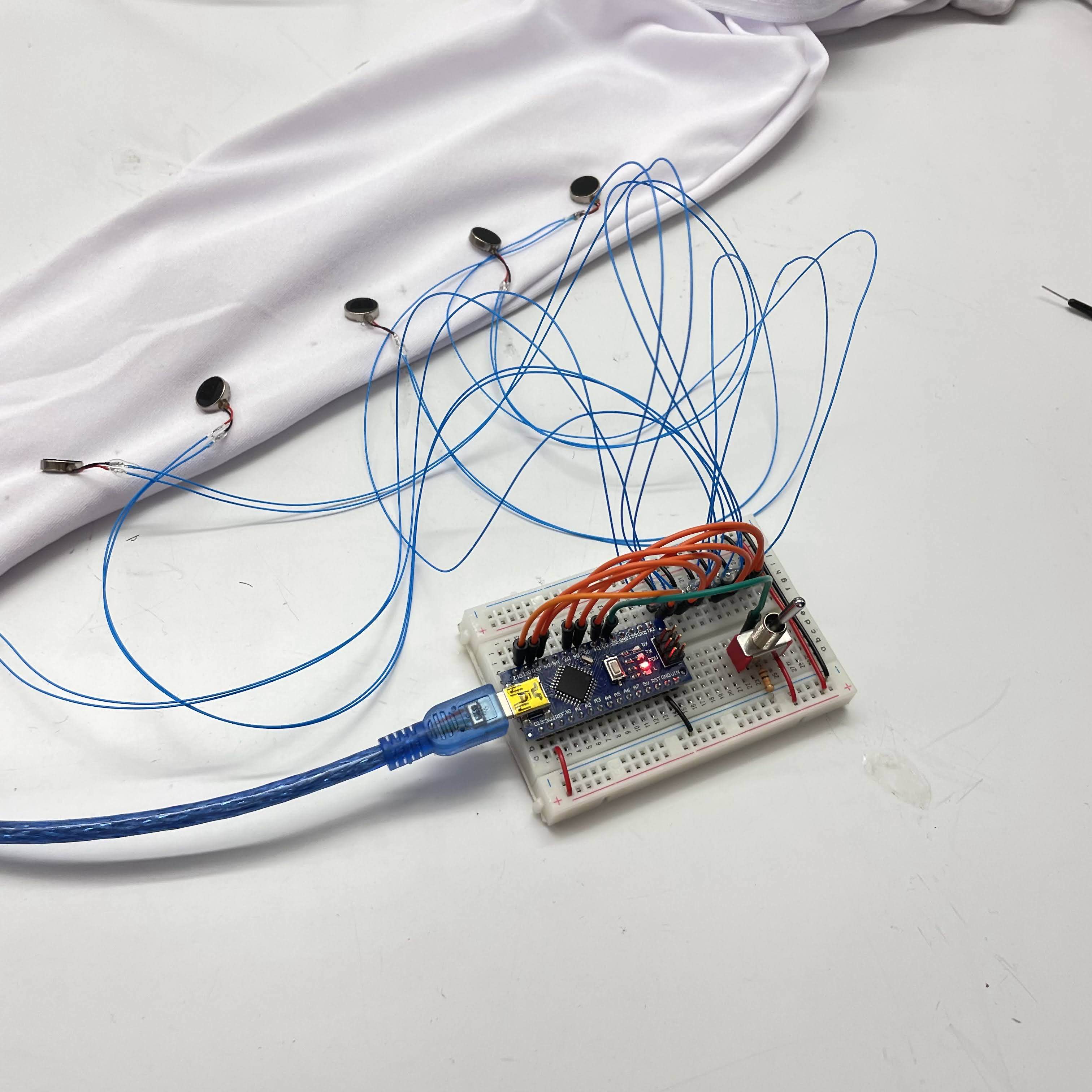
We took the sleeve of a body suit we found, and attached vibration motors to it. We added 3 more motors (6 total) to make the sense of movement more authentic. We chose to place the motors on the arm instead of the palm or fingers since it is less sensitive, making it easier to pull of the illusion.
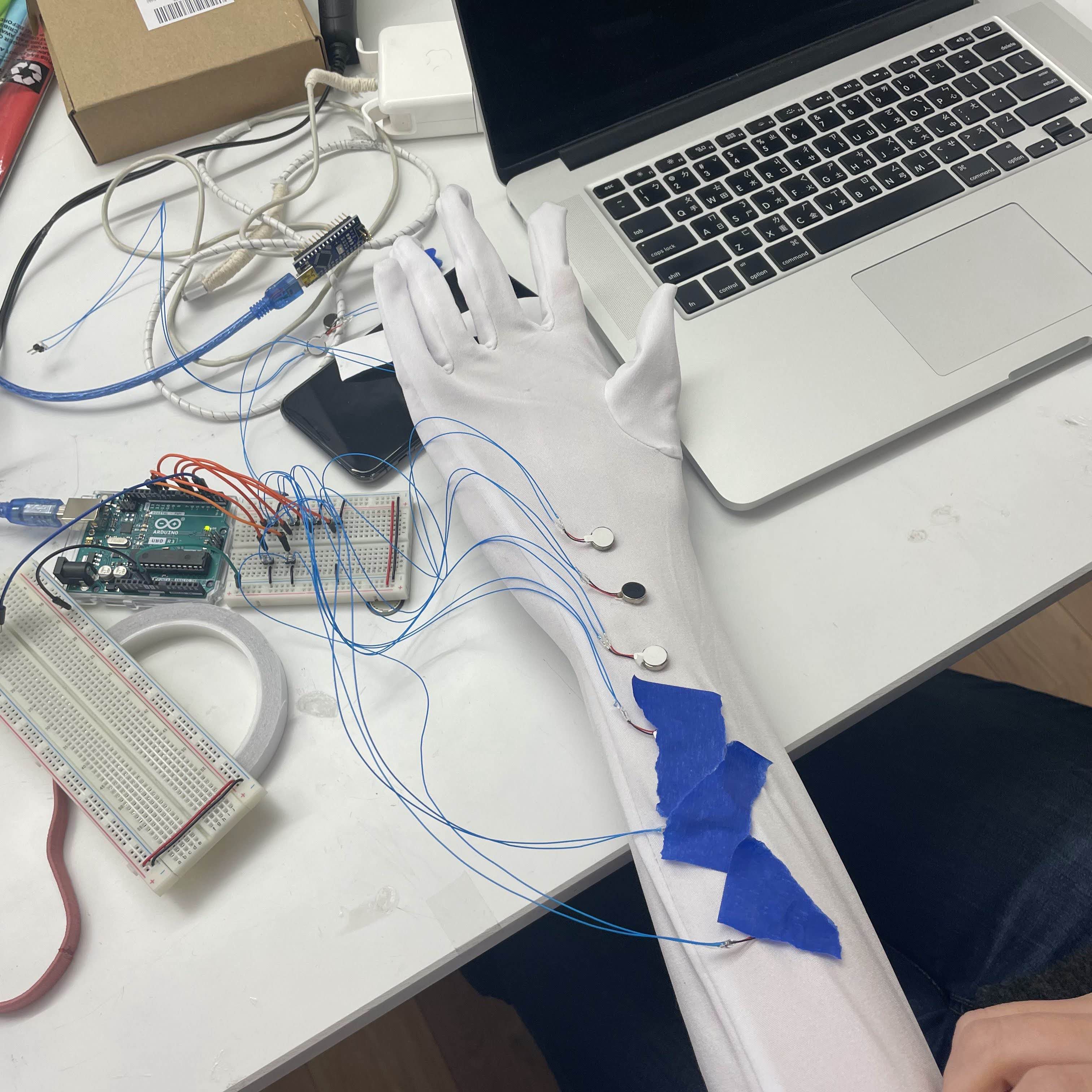
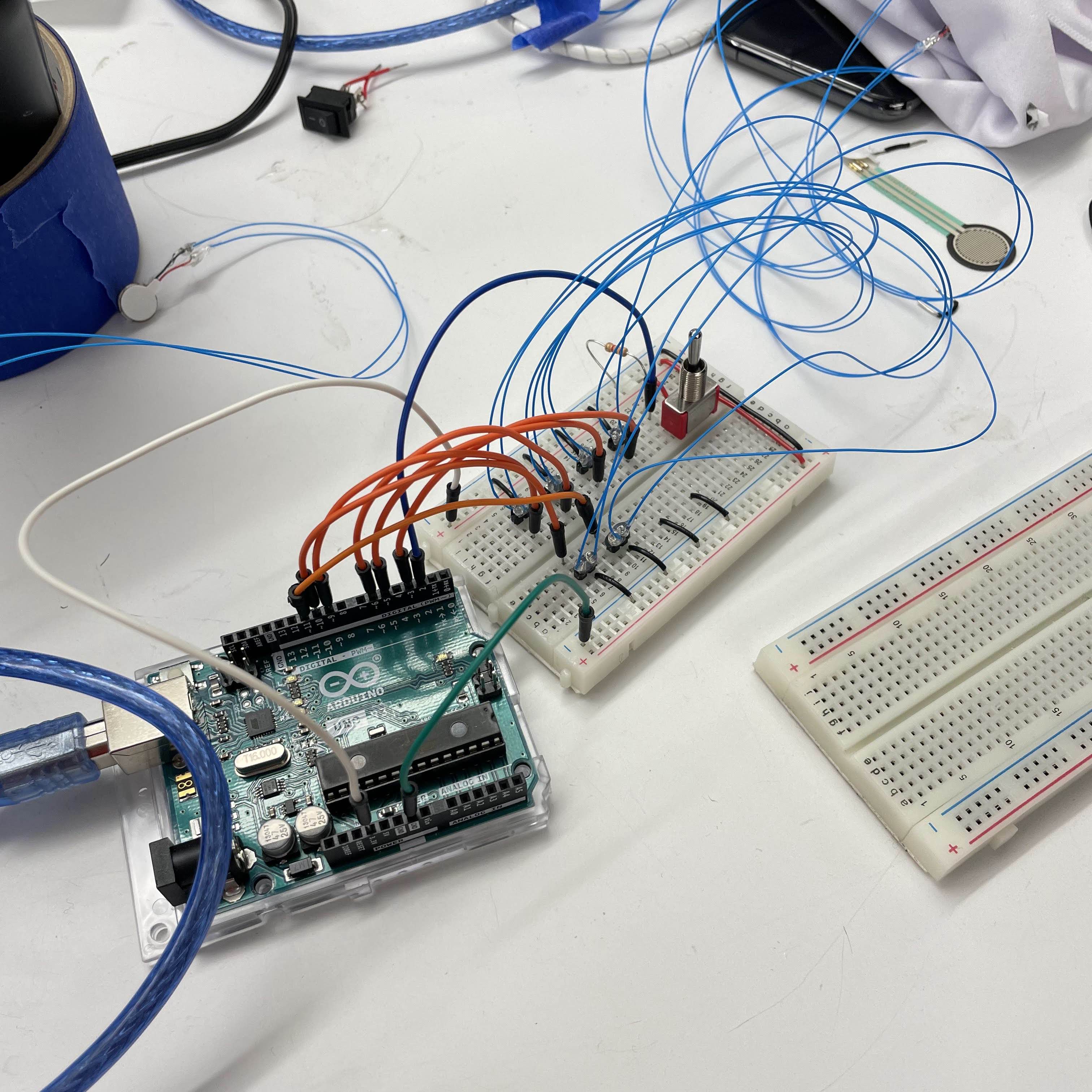
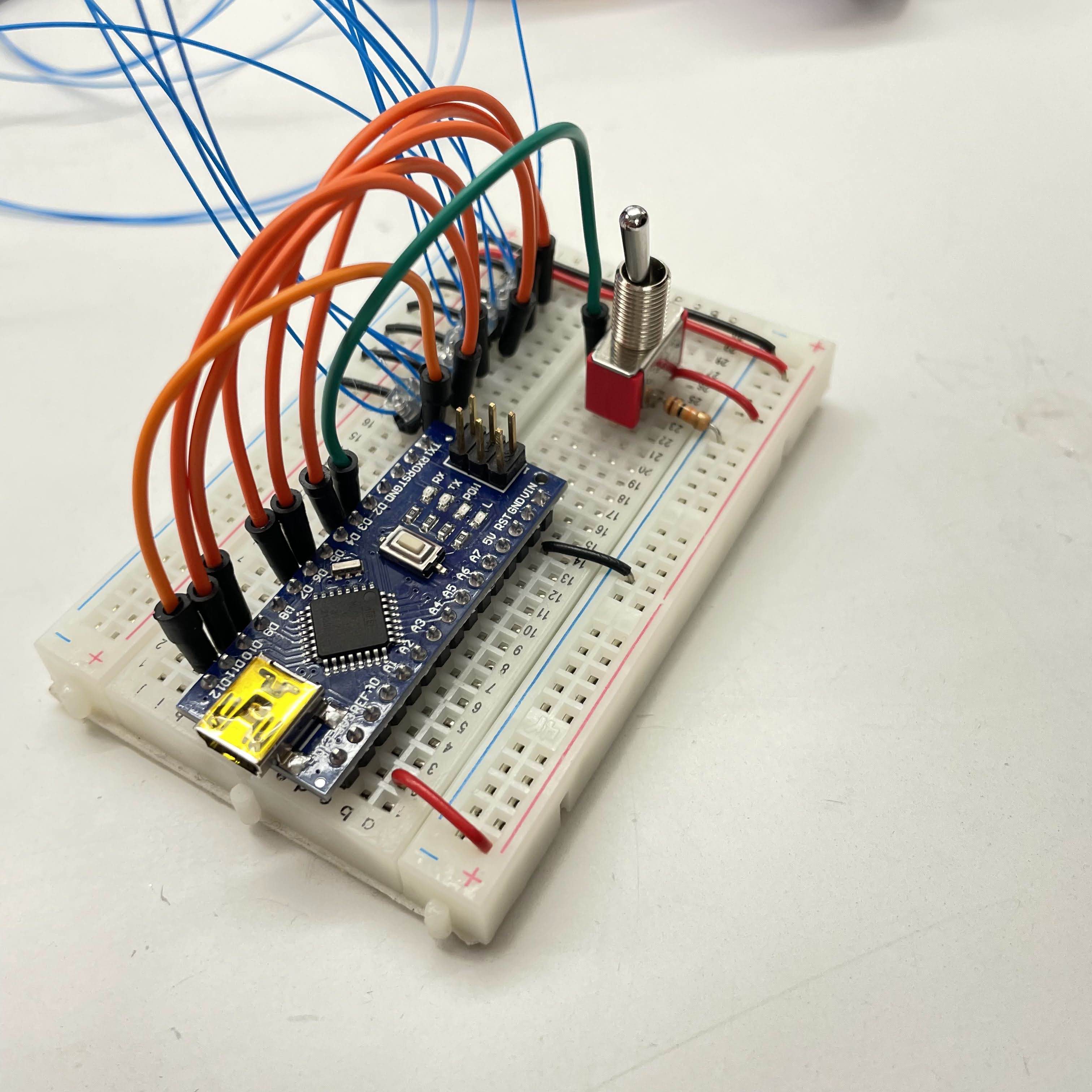
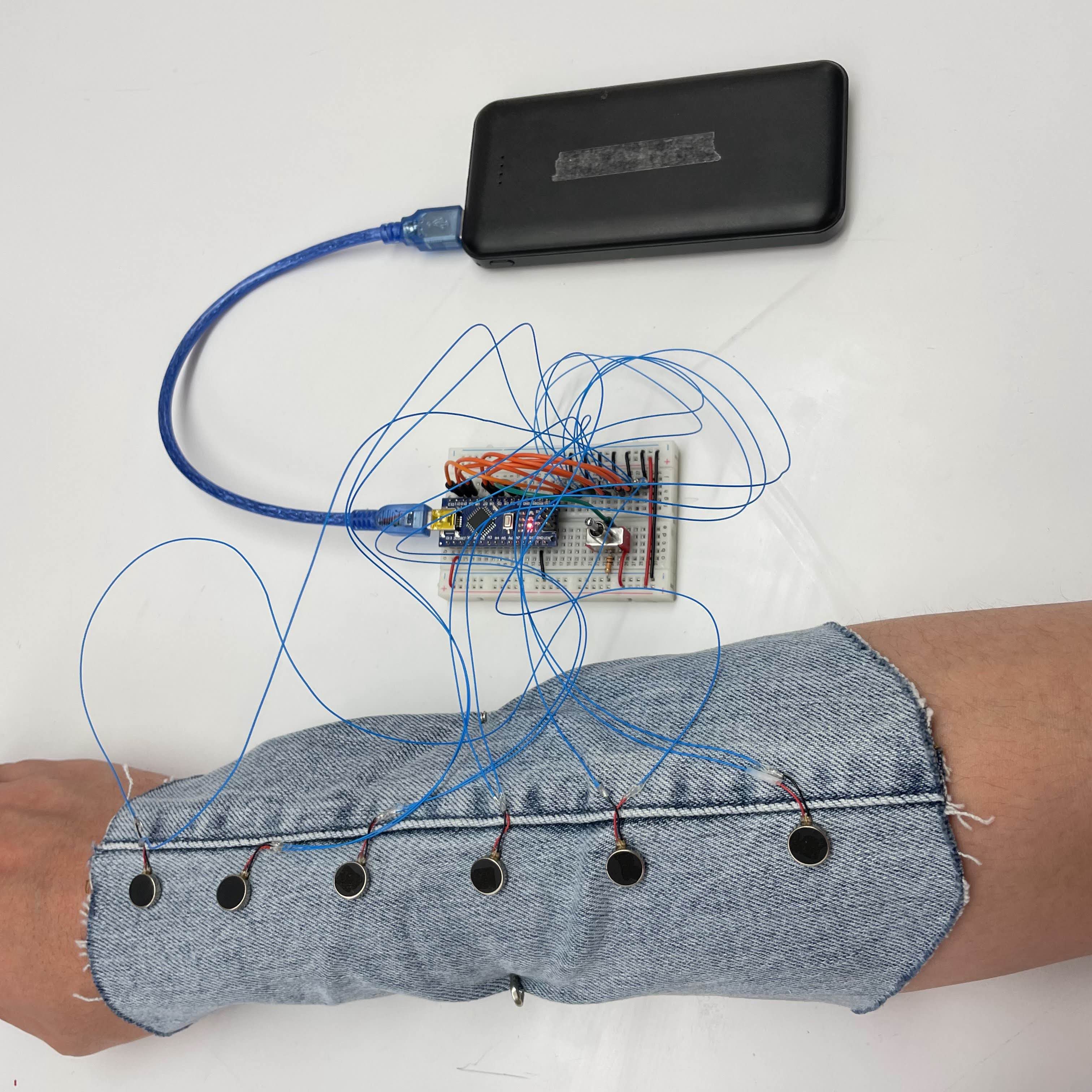
Many people dislike the idea of having an animal crawling on their skin, partially due to the fact that they are not in control of it. For our prototype, we added a switch that lets the user control when the crawling happens. If the user flips to switch to one position, the "bug" will "crawl" up the sleeve. Flip it to the other position, and it will crawl down the sleeve.
To make it look more polished, we used the double-sided adhesive included with the motor to the sleeve:
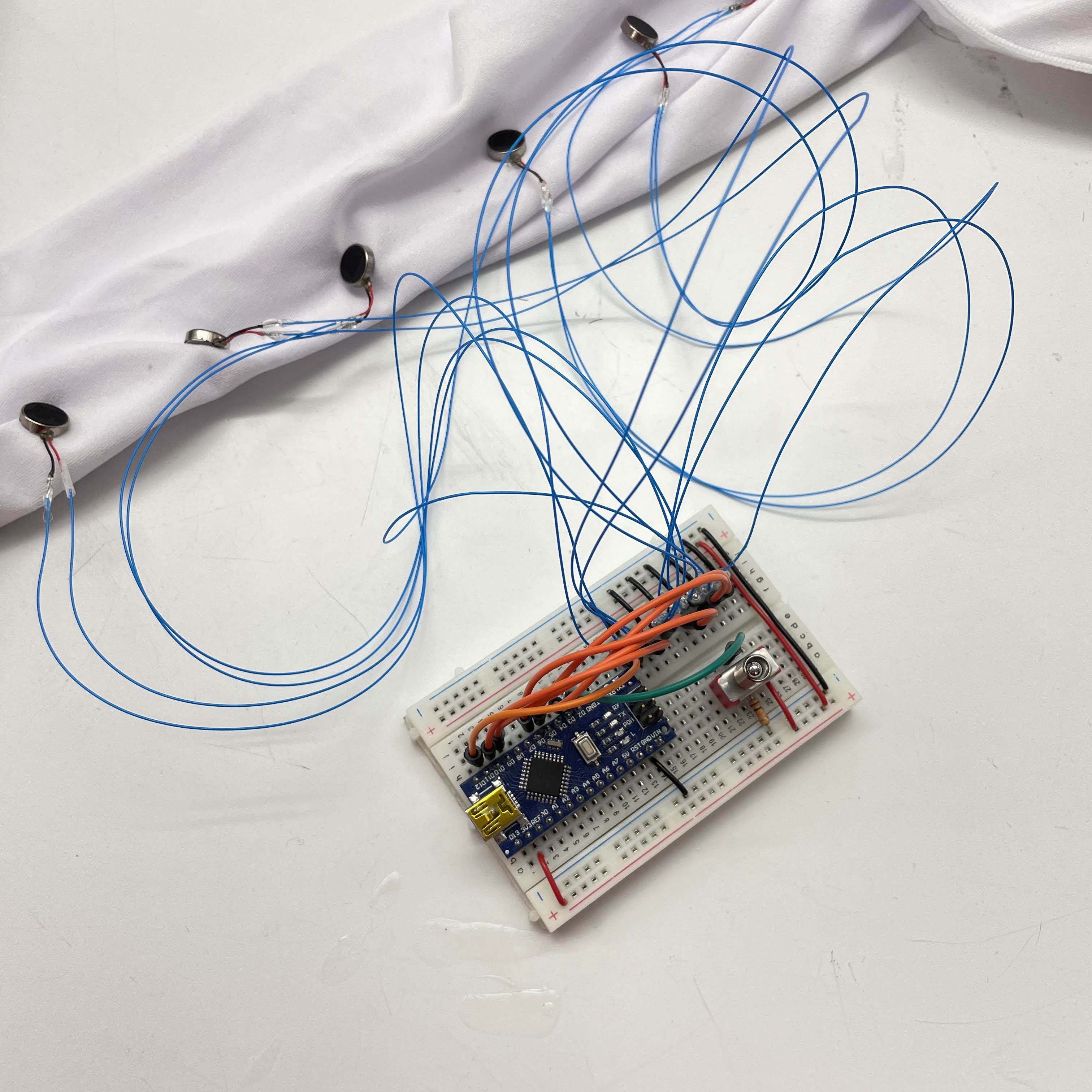
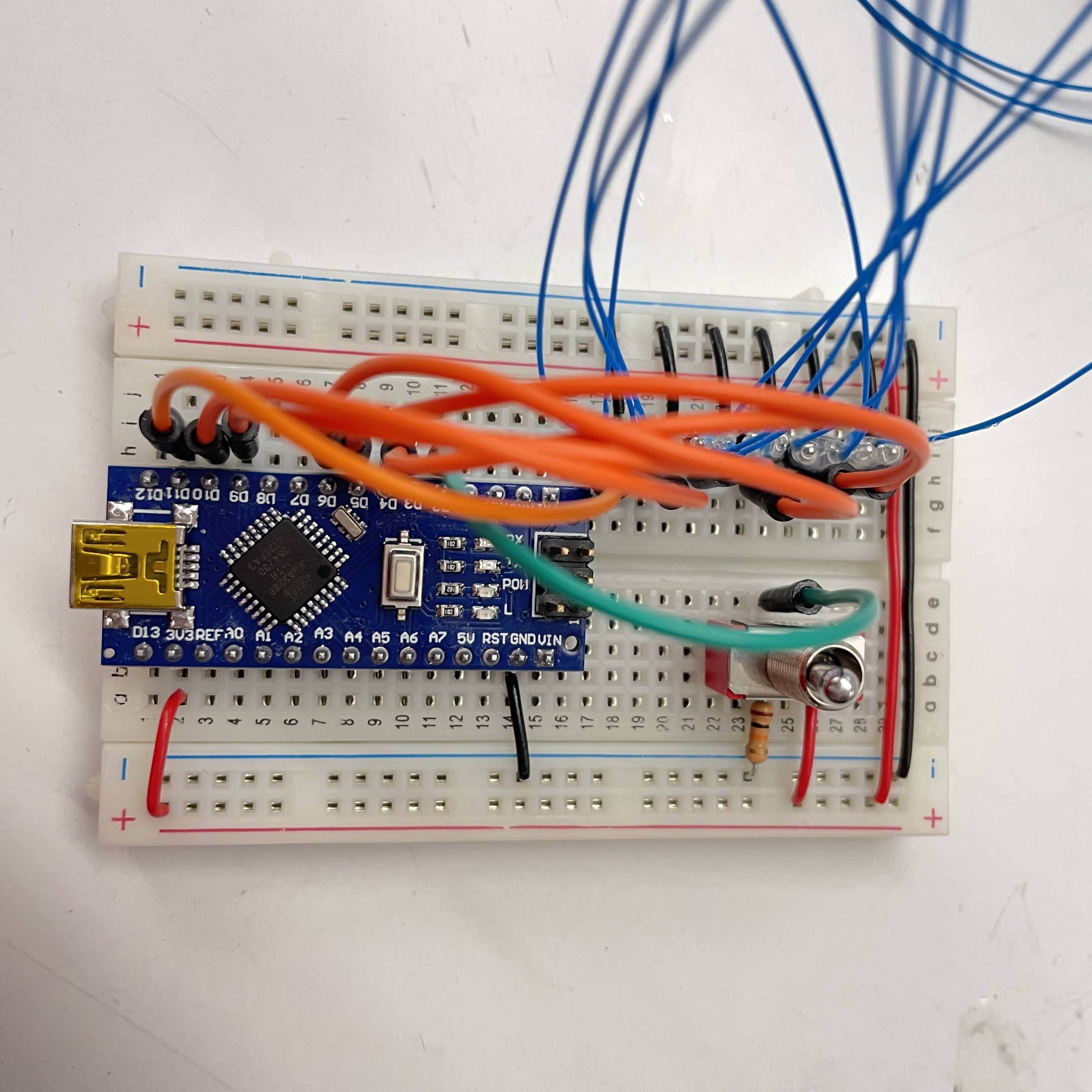
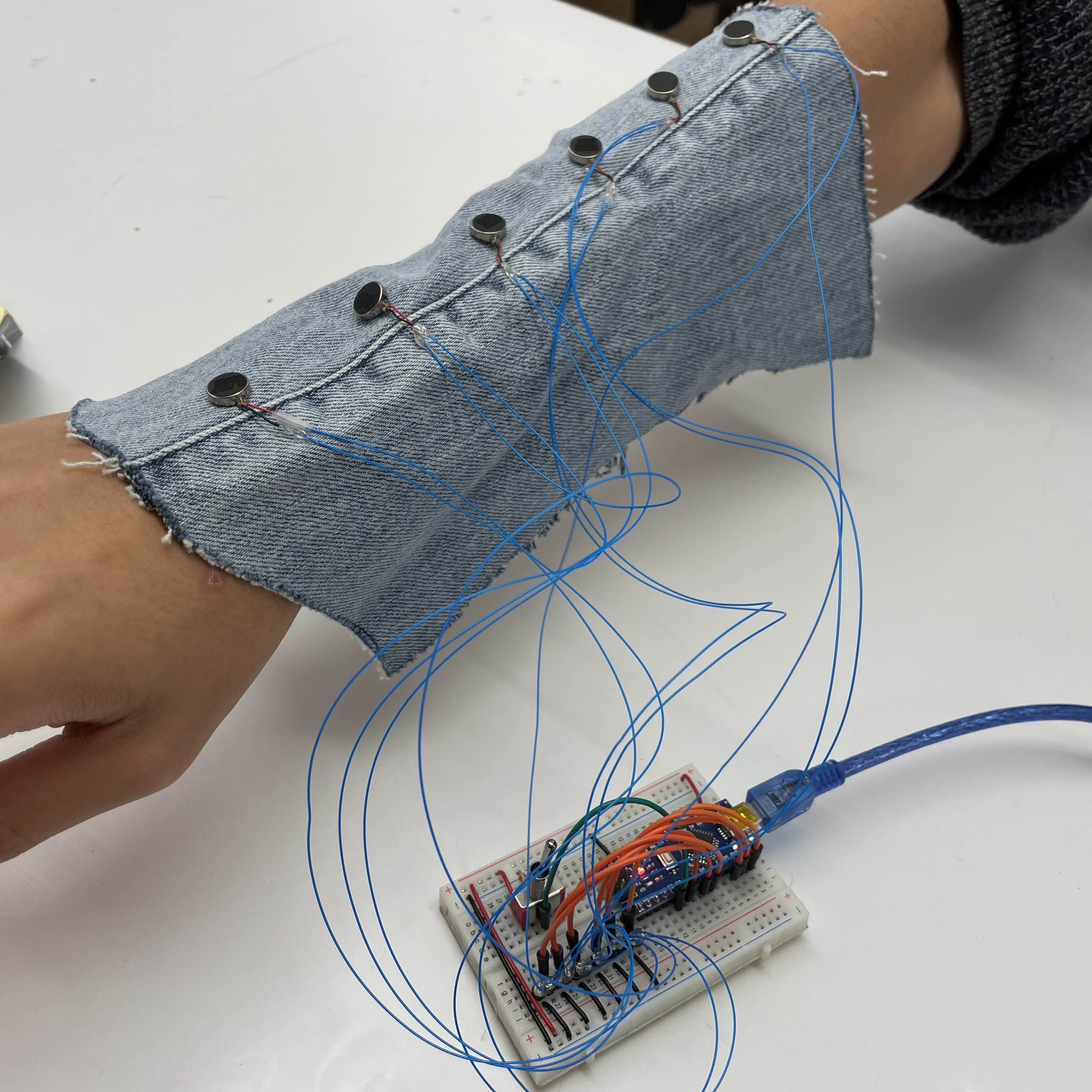
Up until this point, we had been using a Arduino Uno. To make the device more portable, we switched to an Arduino Nano. Switching boards didn't change the vibration -- the Nano provides the same current to the output pins as the Uno.
Close-up shots:
With a black background:
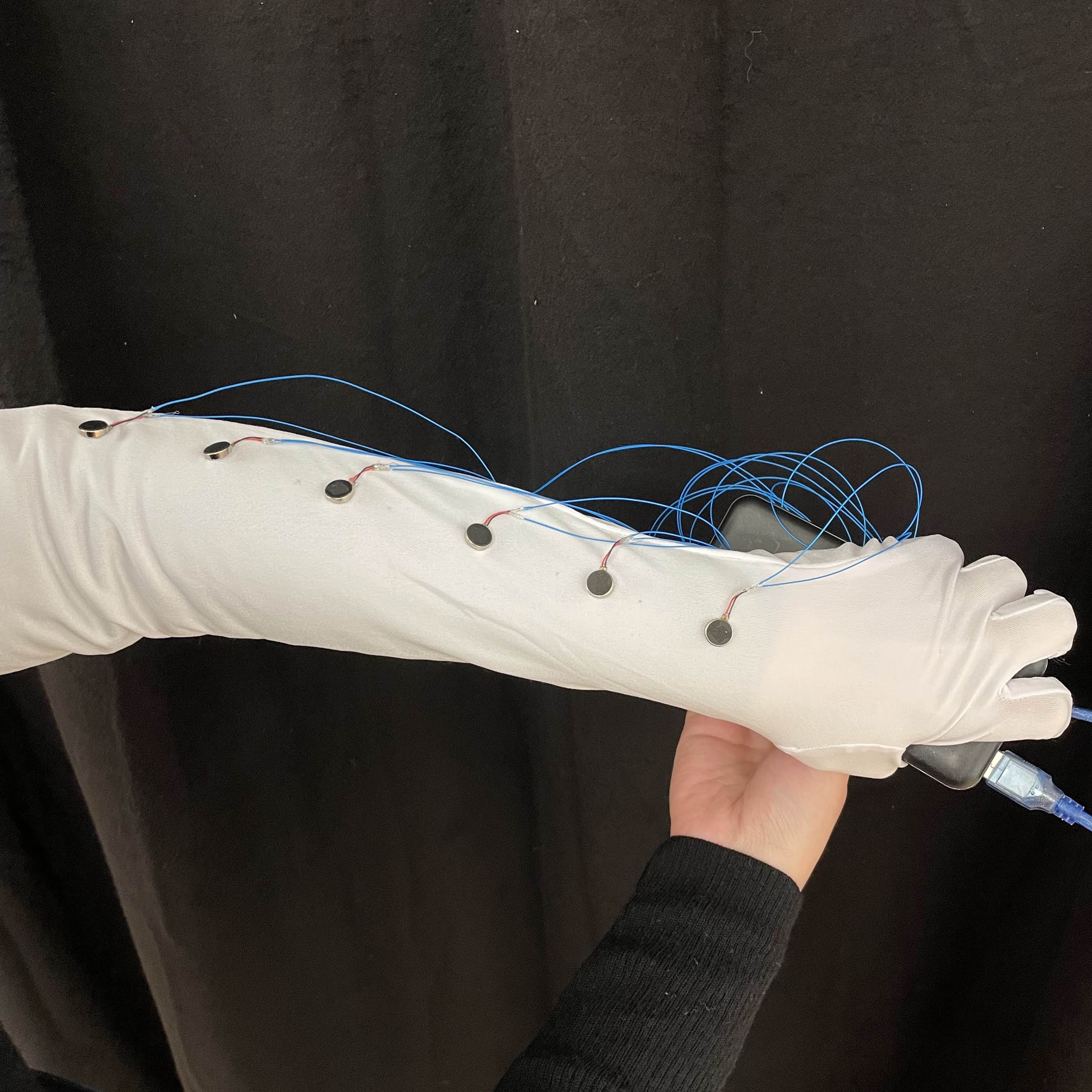
In action:
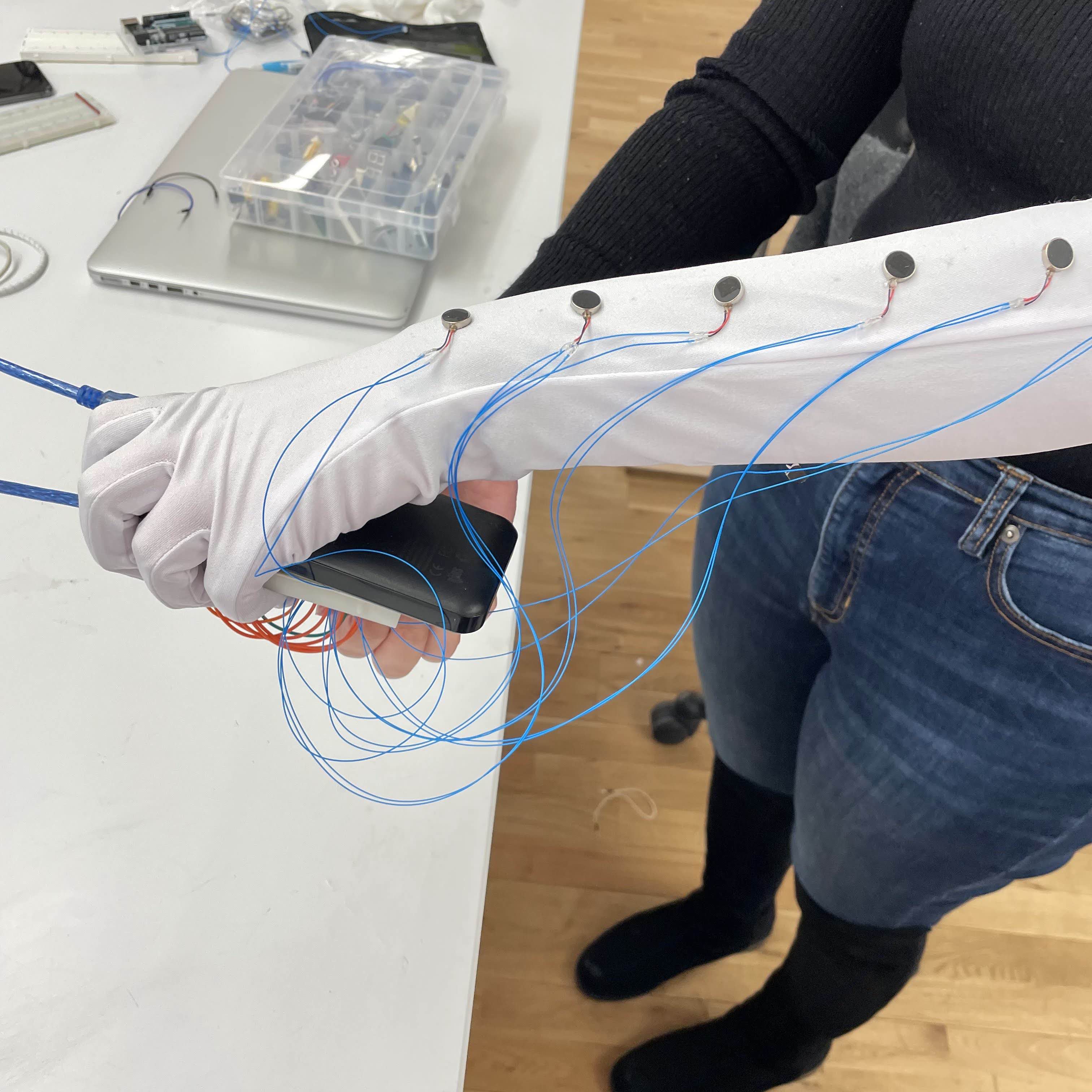
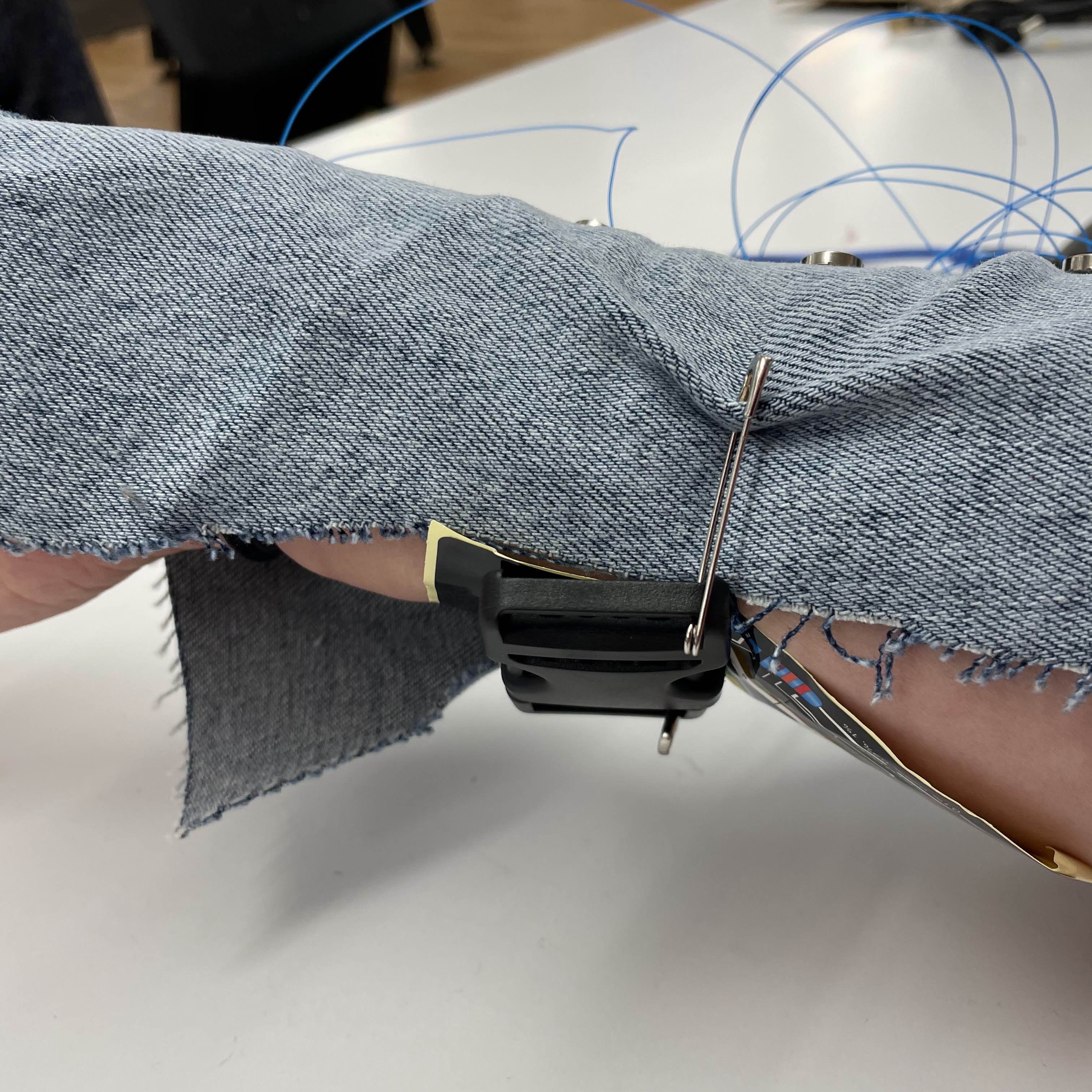
We thought we were done, but one of our classmates Pedro suggested for us to swap out the body suit sleeve for a more compact glove-less sleeve he made. The sleeve even came with a fastener for easy attachment and removal!
In action:
Close-up:
User testing with our friend Anh!